

Motor performance difference 1: speed/torque/size
There are all kinds of motors in the world. Large motor and small motor. A motor that moves back and forth instead of rotating. A motor that at first glance is not obvious why it is so expensive. However, all motors are chosen for a reason. So what kind of motor, performance or characteristics does your ideal motor need to have?
The purpose of this series is to provide knowledge on how to choose the ideal motor. We hope it will be useful when you choose a motor. And, we hope it will help people learn the basics of motors.
The performance differences to be explained will be divided into two separate sections as follows:
Speed/Torque/Size/Price ← The items we will discuss in this chapter
Speed accuracy/smoothness/life and maintainability/dust generation/efficiency/heat
Power generation/vibration and noise/exhaust countermeasures/use environment
1. Expectations for the motor: rotational motion
A motor generally refers to a motor that obtains mechanical energy from electrical energy, and in most cases refers to a motor that obtains rotational motion. (There's also a linear motor that gets straight motion, but we'll leave that out this time.)
So, what kind of rotation do you want? Do you want it to spin powerfully like a drill, or do you want it to spin weakly but at high speed like an electric fan? By focusing on the difference in desired rotational motion, the two properties of rotational speed and torque become important.
2. Torque
Torque is the force of rotation. The unit of torque is N·m, but in the case of small motors, mN·m is commonly used.
The motor has been designed in various ways to increase torque. The more turns of the electromagnetic wire, the greater the torque.
Because the number of winding is limited by the fixed coil size, enamelled wire with a larger wire diameter is used.
Our brushless motor series (TEC) with 16 mm, 20 mm and 22 mm and 24 mm, 28 mm, 36 mm, 42 mm, the 8 kinds of 60 mm outside diameter size. Since the coil size also increases with the motor diameter, higher torque can be obtained.
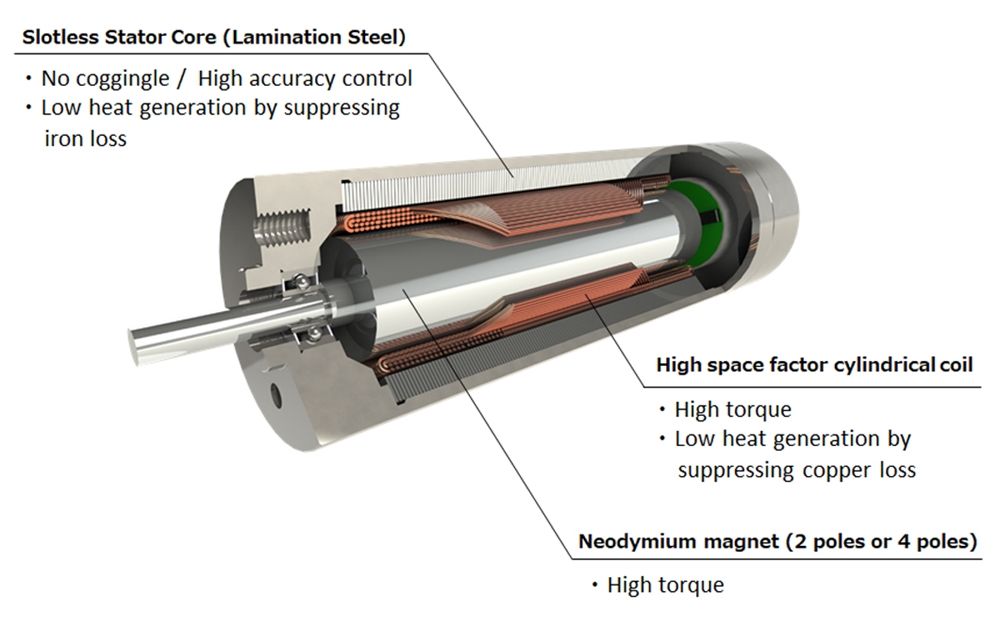
Powerful magnets are used to generate large torques without changing the size of the motor. Neodymium magnets are the most powerful permanent magnets, followed by samarium-cobalt magnets. However, even if you only use strong magnets, the magnetic force will leak out of the motor, and the leaking magnetic force will not contribute to the torque.
To take full advantage of the strong magnetism, a thin functional material called electromagnetic steel plate is laminated to optimize the magnetic circuit.
Moreover, because the magnetic force of samarium cobalt magnets is stable to temperature changes, the use of samarium cobalt magnets can stably drive the motor in an environment with large temperature changes or high temperatures.
3. Speed (revolutions)
The number of revolutions of a motor is often referred to as "speed". It is the performance of how many times the motor rotates per unit time. Although "rpm" is commonly used as revolutions per minute, it is also expressed as "min-1" in the SI system of units.
Compared to torque, increasing the number of revolutions is not technically difficult. Simply reduce the number of turns in the coil to increase the number of turns. However, since torque decreases as the number of revolutions increases, it is important to meet both torque and revolution requirements.
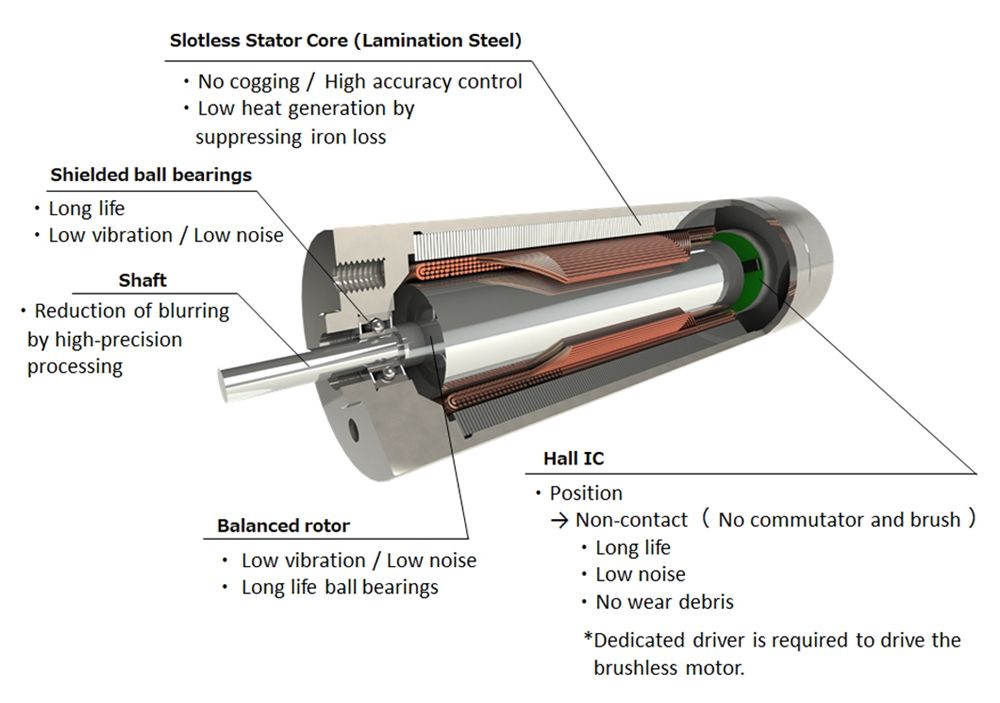
In addition, if high-speed use, it is best to use ball bearings rather than plain bearings. The higher the speed, the greater the friction resistance loss, the shorter the life of the motor.
Depending on the accuracy of the shaft, the higher the speed, the greater the noise and vibration-related problems. Because a brushless motor has neither a brush nor a commutator, it produces less noise and vibration than a brushed motor (which puts the brush in contact with the rotating commutator).
Step 3: Size
When it comes to the ideal motor, the size of the motor is also one of the important factors of performance. Even if the speed (revolutions) and torque are sufficient, it is pointless if it cannot be installed on the final product.
If you just want to increase speed, you can reduce the number of turns of the wire, even if the number of turns is small, but unless there is a minimum torque, it will not rotate. Therefore, it is necessary to find ways to increase the torque.
In addition to using the above strong magnets, it is also important to increase the duty cycle factor of the winding. We have been talking about reducing the number of wire winding to ensure the number of revolutions, but this does not mean that the wire is loosely wound.
By using thick wires instead of reducing the number of windings, large amounts of current can flow and high torque can be obtained even at the same speed. The spatial coefficient is an indicator of how tightly the wire is wound. Whether it is increasing the number of thin turns or reducing the number of thick turns, it is an important factor in obtaining torque.
In general, the output of a motor depends on two factors: iron (magnet) and copper (winding).
Post time: Jul-21-2023


